Robotics 1
Description:
Robotics I is a college-level first course in robotics, appropriate for engineering students at the junior or senior college level.
Prerequisites:
This course assumes that the student already has alredy had first courses in trigonometry and linear (matrix) algebra, and has some knowledge of ordinary differential equations. The student should also have some knowledge of basic circuits such as Ohm's law, and should have some experience in programming in any language.
Topics Covered:
- Kinematics
- Kinematic diagrams
- Forward kinematics (including Denavit-Hartenberg)
- Rotation matrices
- Homogeneous transformation matrix
- Coordinate transformation
- The graphical approach to inverse kinematics
- Sensors and Machine Vision
- Sensor types
- Analog to digital conversion
- Image matrix representation
- Colorspace
- Background subtration
- Center of mass approach to object localization
- Camera coordinates
- Motion control
- DC motor equations
- Pulse-Width Modulation (PWM)
- DC motors torque/speed relationships
- Open-loop vs. feedback position control
- On/Off feedback position control
- PID position control
Skills Covered:
- Soldering
- Use of a multimeter
- Embedded C programming
- Python programming
- Analog and digital microcontroller IO
- OpenCV
- Troubleshooting robotic systems
Final Challenge:
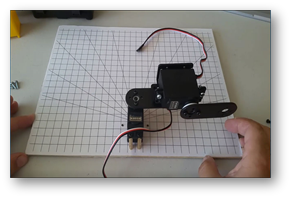
Build and program a 3-degree-of-freedom SCARA or Articulated type robotic manipulator to perform a pick-and-place operation. In order to do this, the device will use a webcam and your own code written in Python with OpenCV to automatically find the location of a ferromagnetic object placed within the robot's workspace. This information will then be sent to the PSoC microcontroller, which will position the electromagnet end-effector at the correct location, pick up the object, then move to a new location, and release the object.
Robotics 2
Description:
Robotics 2 is a college-level second course in robotics, appropriate for engineering students at the junior or senior college level.
Prerequisites:
This course assumes that the student already has already completed Robotics 1.
Topics Covered:
- Kinematics
- 6 degree-of freedom manipulators using the spherical wrist
- Inverse kinematics of 6-DoF manipulators (position and orientation)
- Jacobian matrix for end-effector velocity control
- Machine Vision
- Motion by optical flow
- Masking
- Object identification by features
- Motion control
- Stepper motors speed and position
- Controller design from a system model
- System modeling from the time and frequency responses
- Artificial Intelligence
- Simple reflex and utility agents
- Problem-solving and searching: Depth-first and breadth-first searches
- Problem-solving and searching: A* search
- Machine learning: unsupervised learning: K-means clustering
- Machine learning: supervised learning: Support vector machine
- Machine learning: supervised learning: Artificial Neural Networks
- AI for Machine Vision: Feature space
- AI for Machine Vision: Feature reduction by Principle Components Analysis
- AI for Machine Vision: Object identification by freatures
Skills Covered:
- Controling stepper motors with a microcontroller
- Writing AI algorithms in Python
- Receiving input to a microcontroller from a matrix keypad
Final Challenge:
1. Visual Tracker: Connect a camera to the shaft of a stepper motor. Find the location of an object in view, and continuously move the stepper motor to keep the object in view.
2. SCARA Writer: Attach a dry-erase marker to the end-effector of a 3-DoF SCARA manipulator. Based on user input given from a keypad, draw specific shapes at specified size and speed.
3. Object Sorter: Automatically learn categories of objects from examples shown to a camera. When a new object is shown, determine which category the new object most likely fits.
Robotics 0
Description:
Coming soon
Prerequisites:
Topics Covered:
Skills Covered:
Final Challenge:
Trigonometry Short Course
Description:
Coming soon
Prerequisites:
Topics Covered:
Skills Covered:
Final Challenge:
Linear Algebra Short Course
Description:
Coming soon
Prerequisites:
Topics Covered:
Skills Covered:
Final Challenge:
Ordinary Differential Equations Short Course
Description:
Coming soon
Prerequisites:
Topics Covered:
Skills Covered:
Final Challenge:
Systems Modeling and Control
Description:
Coming soon
Prerequisites:
Topics Covered:
Skills Covered:
Final Challenge:


Robotics 1
Robotics 1 is a college-level introductory robotics class covering introductory kinematics, digital and analog sensors, machine vision, and feedback control.
Topics:
- Kinematic Diagrams
- Rotation Matrices
- Displacement Vectors
- Homogeneous Transformation Matrices
- Denavit-Hartenberg
- Sensors
- Cameras and Color
- Background Subtraction
- Coordinate Transformation
- DC Motors Torque/Speed
- Pulse-Width Modulation
- Open-Loop and Feedback Control
- Step Response
- PID Control
- Kinematic Diagrams
- Rotation Matrices
- Displacement Vectors
- Homogeneous Transformation Matrices
- Denavit-Hartenberg
- Sensors
- Cameras and Color
- Background Subtraction
- Coordinate Transformation
- DC Motors Torque/Speed
- Pulse-Width Modulation
- Open-Loop and Feedback Control
- Step Response
- PID Control
Skills:
- C Programming
- Python Programming
- Soldering
- Breadboarding
- Use of Motor Driver Chip
- Use of a Hall Quadrature Encoder
- Analog to Digital Conversion
- PSoC Microcontrollers
- UART Communication
- Use of an LCD Screen
- OpenCV
- C Programming
- Python Programming
- Soldering
- Breadboarding
- Use of Motor Driver Chip
- Use of a Hall Quadrature Encoder
- Analog to Digital Conversion
- PSoC Microcontrollers
- UART Communication
- Use of an LCD Screen
- OpenCV

Robotics 2
Robotics 2 is a college-level intermediate robotics class covering intermediate kinematics, machine vision, artificial intelligence, and feedback control.
Topics:
- Inverse Kinematics for 6-DoF
- Jacobian Matrices
- Path-Planning and Collision Avoidance
- Parallel Manipulators
- Motion Detection
- Image Masking
- AI Problem Solving and Searching
- Machine Learning
- Image Understanding by Features
- Stepper Motors
- Analytical System Modeling
- Analytical Controller Tuning
- Frequency Response
- Empirical System Modeling
- Inverse Kinematics for 6-DoF
- Jacobian Matrices
- Path-Planning and Collision Avoidance
- Parallel Manipulators
- Motion Detection
- Image Masking
- AI Problem Solving and Searching
- Machine Learning
- Image Understanding by Features
- Stepper Motors
- Analytical System Modeling
- Analytical Controller Tuning
- Frequency Response
- Empirical System Modeling
Skills:
- C Programming
- Python Programming
- Stepper Motors Position and Speed
- Matrix Keypad
- Differential Equation Modeling
- C Programming
- Python Programming
- Stepper Motors Position and Speed
- Matrix Keypad
- Differential Equation Modeling


RoboGrok is a series of university-level robotics courses that balance theory and practice to turn you into an engineering guru.
Free video lectures cover a wide range of robotics topics common to most university robotics classes. Theory is paired with a set of 'challenges' and a kit of parts that allows you to practice as you learn, and end up building and programming complete robots.
Free video lectures cover a wide range of robotics topics common to most university robotics classes. Theory is paired with a set of 'challenges' and a kit of parts that allows you to practice as you learn, and end up building and programming complete robots.

Courses



