
Robotics 1
Digital Sensors
Digital Sensors
This video gives an introduction to sensors and the topics that will be covered in this and the next module covering digital and analog sensors.
In this video, you will be introduced to a few different kinds of switches, and will learn how to read a switch with the PSoC.
In this video, you will learn how a hall quadrature encoder works by wiring it up and reading it with the PSoC. Then, we will look at a couple of other types or categories of encoders.
To complete this lab activity, make a video that includes the following in one video:
(1) You saying your name
(2) Your LCD screen showing 'on' when you press a button
(3) Your LCD screen counting up and down when you rotate the encoder disk in the positive and negative directions, respectively
Graduate students also have to show:
(4) Your manipulator moving at a constant velocity at two different angles of Theta 2, so that the end-effector moves at two different velocities.
(1) You saying your name
(2) Your LCD screen showing 'on' when you press a button
(3) Your LCD screen counting up and down when you rotate the encoder disk in the positive and negative directions, respectively
Graduate students also have to show:
(4) Your manipulator moving at a constant velocity at two different angles of Theta 2, so that the end-effector moves at two different velocities.

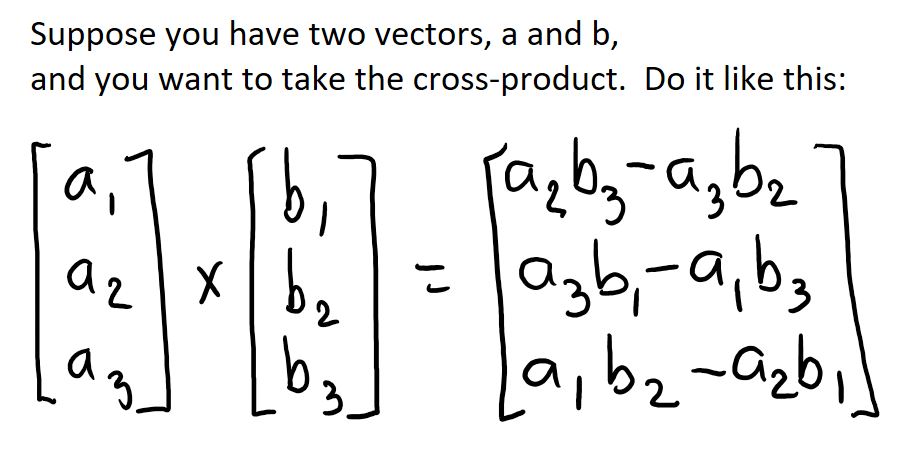
In this video, you are introduced to the 'Jacobian Matrix', which relates joint velocities to end-effector velocities. To help introduce the problem that the Jacobian matrix solves, you are lead through an experiment setting the velocity of one of the servos in the SCARA manipulator.
In this video, you are shown how to find the Jacobian matrix using the Jacobian matrix table. Two examples are given, one for a manipulator with prismatic joints and one for a manipulator with revolute joints. For each example, we examine the meaning of the matrix to help us check for errors.